Collaborative Robotics
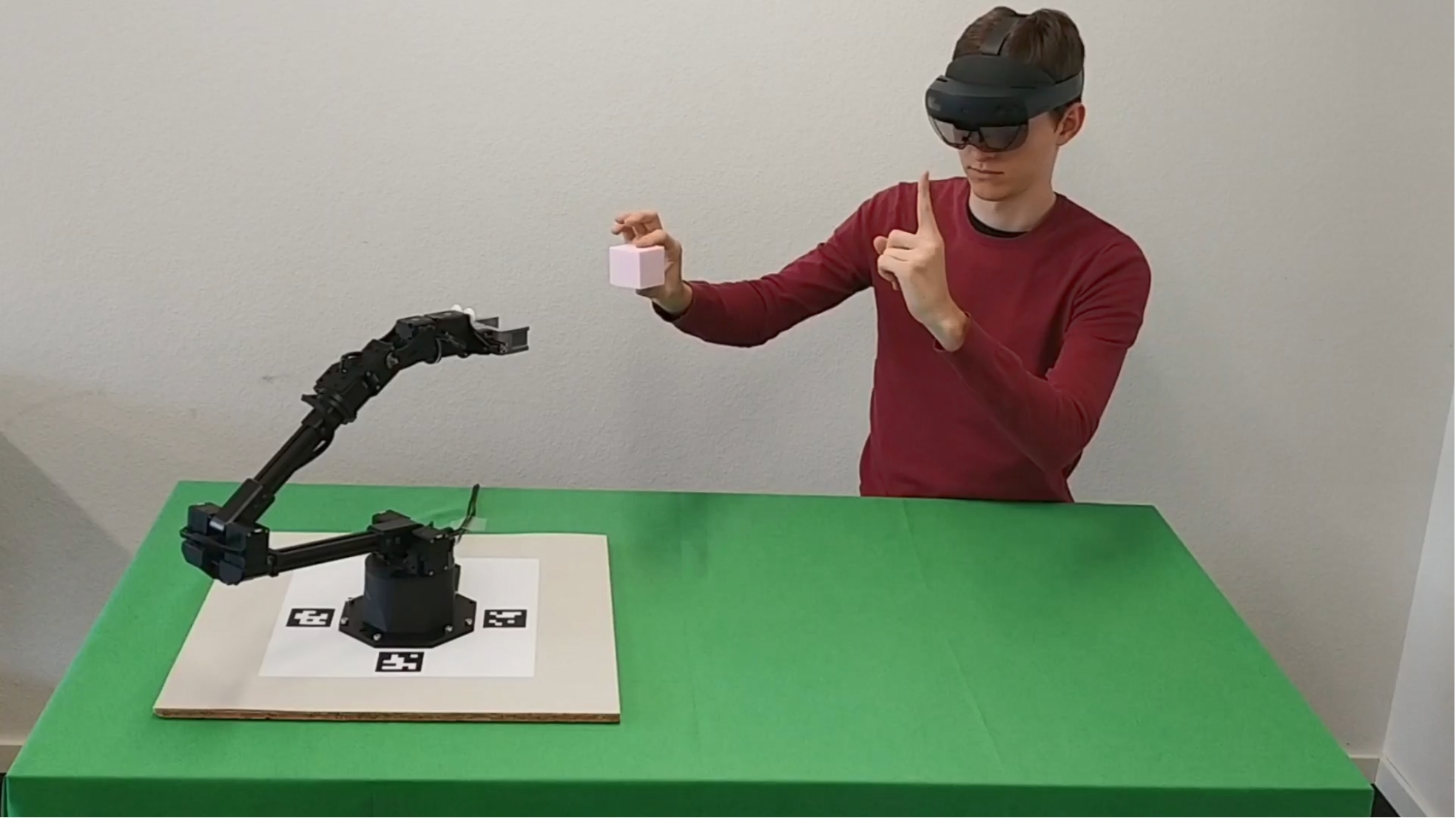
Colloborative Robots (Cobots) are intended for direct human-robot interaction within a shared space. A responsive collaboration requires the robot to track the human's behavior (e.g. hand movements) and to act based on it.
Hand Gesture Control
Hand gesture control is the ability to recognize and interpret movements of the human hand in order to interact with and control the robot without direct physical contact. In a pilot project, we implemented hand gesture recognition to test three intuive hand gestures: (1) thumb up for a start command, (2) index finger up for a repeat command and (3) hand palm up for a stop command. For hand tracking we used the Microsoft HoloLens 2.
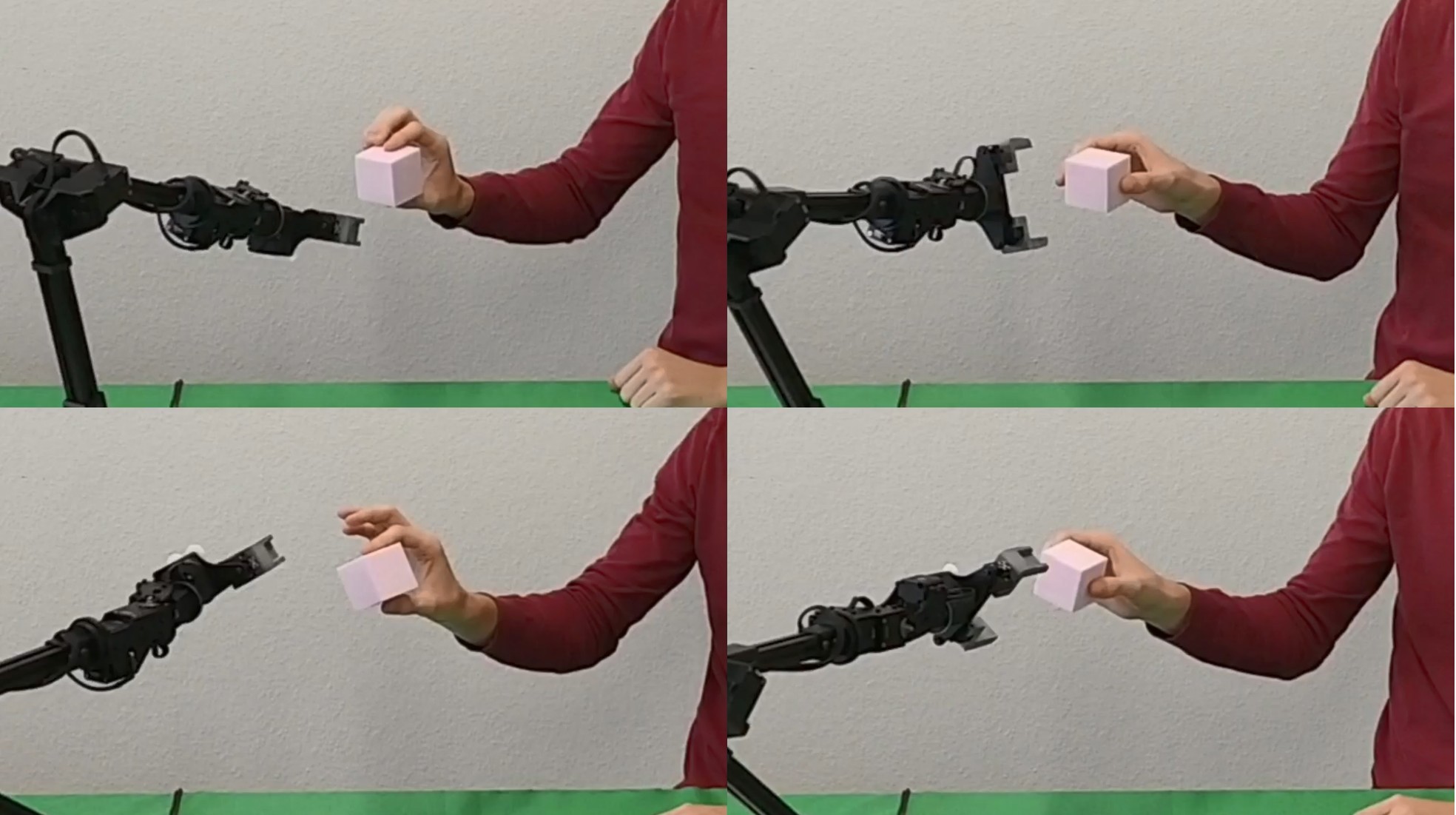
Adaptive Gripper Positioning
In an object handover, the robot's task is to reach for an object hold by the human and take the object using its gripper. To do this, the robot has to detect the object and its pose in 3D space. In order to avoid harm to the fingers holding the object, the position of the fingers have to be tracked as well. Based on this information, the robot can positioning the gripper adaptively and only use free areas of object for the handover.
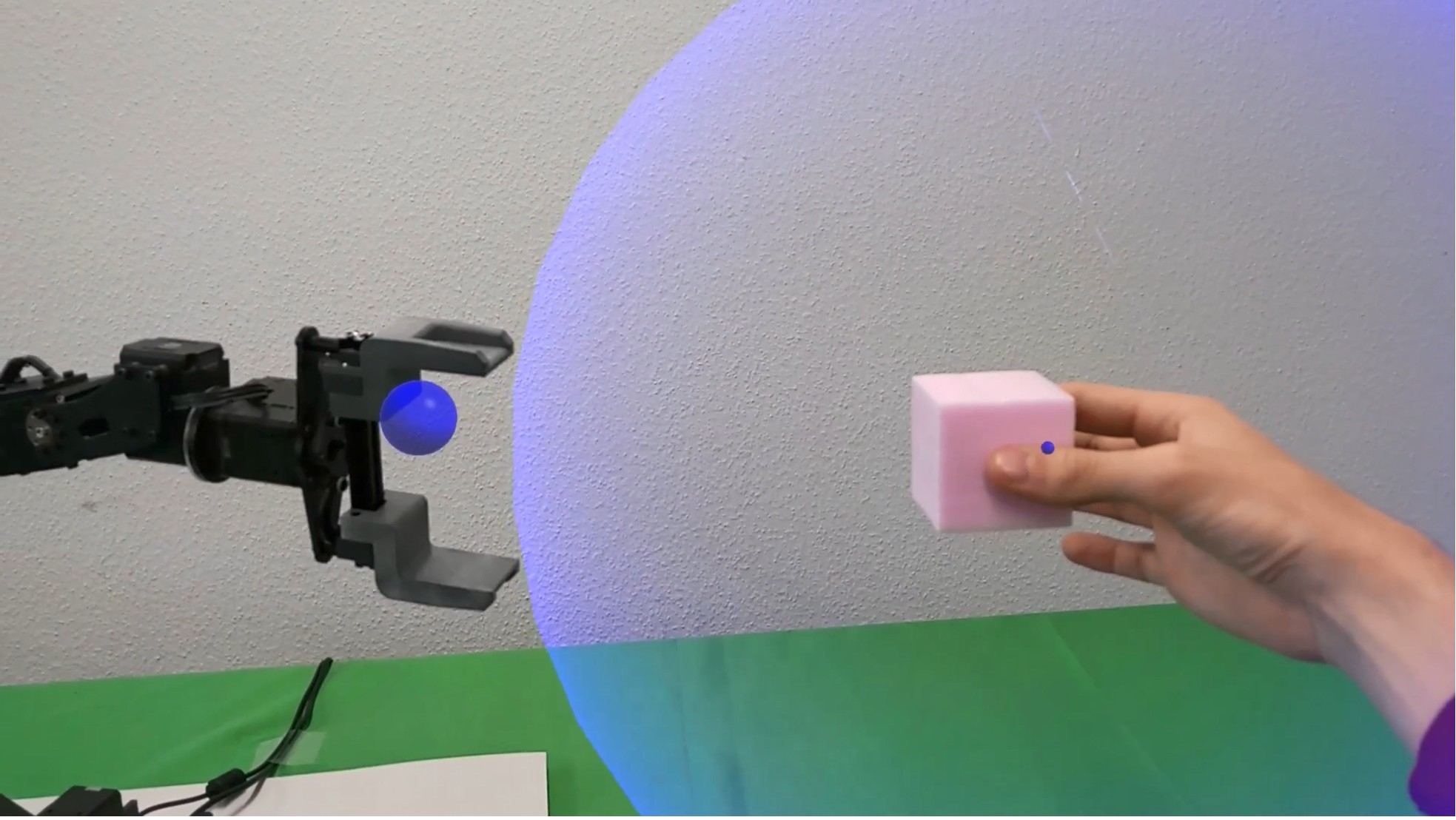
Adaptive Safety Spaces
A collaborative robot is sharing the work space with a human, exposing the human to the risk of colliding with the robot arm. In order to avoid collisions, we propose a virtual safety bubble surrounding the human. In doing so, the robot can continously adapt its movement to those trajectories avoiding the human safety space. During collaborative tasks, such as the object handover, we further used a safety bubble around the hand to define the space, in which the robot has to slowly approach and early indicate the use of the gripper.
For more information please contact Lucas Gimeno.