Adaptable Compliant Mechanism
Adjustable impedance makes the interaction between machines and an unstructured world more robust. Machine elements for this kind of functionality render adjustable impedance technology more accessible.

For a robust interaction between a machine and an unstructured, unknown environment, as well as for safe physical human-robot interaction (pHRI), it is important that the machine behaves compliantly. In other words, the system’s impedance needs to be low enough for the system to adapt to the environment or human body. Different applications and use cases require often different impedance levels.
While active impedance control is very flexible, it requires very precise sensors and a lot of effort and expertise to implement the control. Passive mechanical impedance can offer a cheaper, more stable and more efficient solution.
The aim of this project is to develop a compact and versatile mechatronic machine element that incorporates variable stiffness and variable damping for rotary motion.
Research topics:
- Derivation of desired impedance characteristics (requirements for the element) in the system context (requirements and dynamics of the whole system where the elements will be integrated)
- Adaptation of existing technology to create robust and compact Adjustable Impedance Elements (AIE)
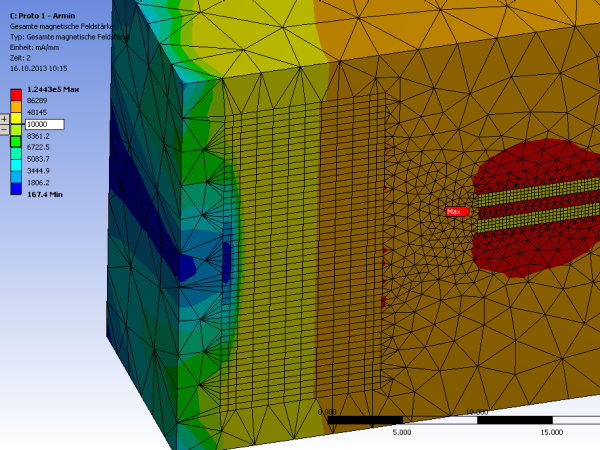
- Understanding of the mapping from the element’s design parameters to the desired impedance characteristics
Physical project outcomes so far:
- Over 10 function prototypes of different technical approaches
- Test bench to measure the impedance characteristics of rotary elements
- First integrated AIE prototype combining variable stiffness and damping
Impressions and related material: