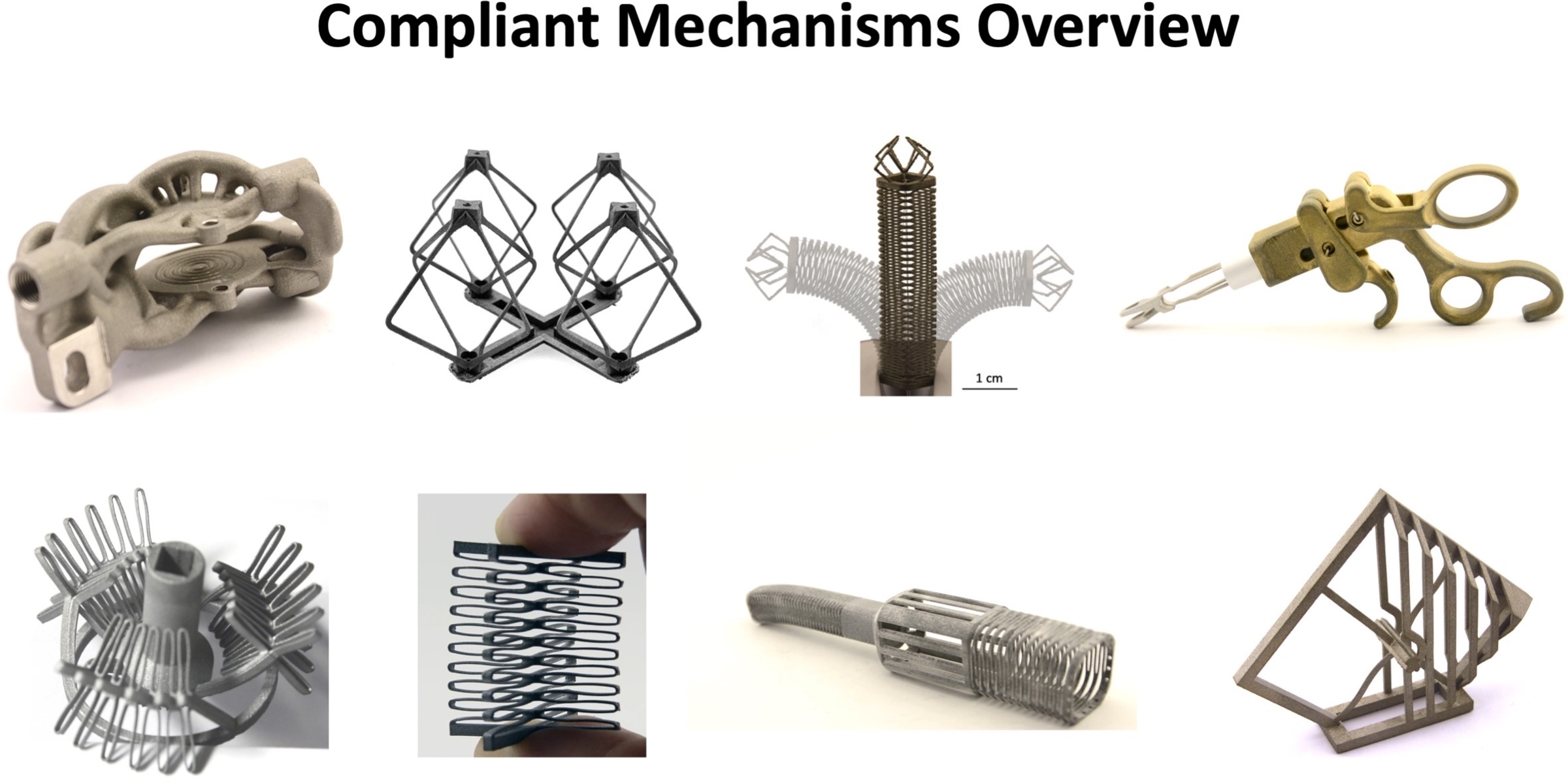
Design for Additive Manufactured Compliant Mechanisms
Compliant mechanisms are flexible structures that gains its force and motion transmission through the elastic deformation of its monolithic compliant members. The “free complexity” potential of metallic 3D-printing enables the design and manufacturing of complex planar and spatial compliant mechanisms that are more complicated to fabricate by conventional manufacturing processes. This design freedom facilitates the CM Design with unpresented complexities in shape, functionality and scalability.
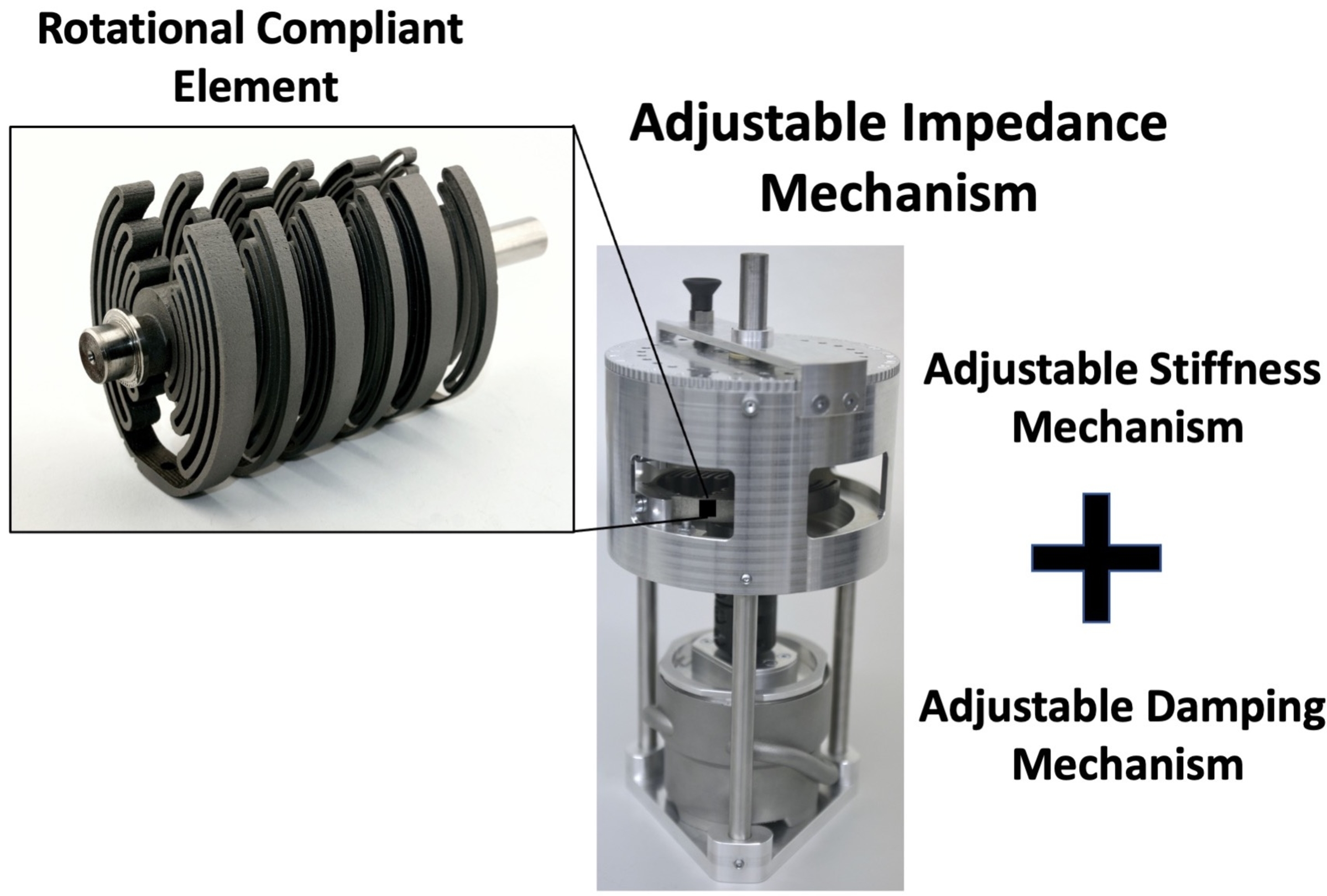
Development of Adjustable Impedance Mechanisms
Within this work we develop and manufacture an adjustable stiffness mechanism (ASM) by utilizing the potential of Additive Manufacturing (AM), and Selective Laser Melting (SLM) more specifically. The main focus of the project was to manufacture the rotational non-linear spring element, that is part of the ASM. By using AM, the spring element can be a monolithic object and can be manufactured all at once. Furthermore, this ASM is modular assembled within an impedance mechanism that is a combination of a damper and a spring mechanism. It can absorb shocks and dampen vibrations. The capabilities and value of an adjustable impedance mechanism can be increased even further for multiple frequency and loading range by adding the possibility to adjust the damping and stiffness. Consequently, this variable impedance element can quickly adapt to different situations, e.g., softening the movement of the robotic device if the danger of a collision with a human is given, or stiffening the joints of the robotic device to increase precision.
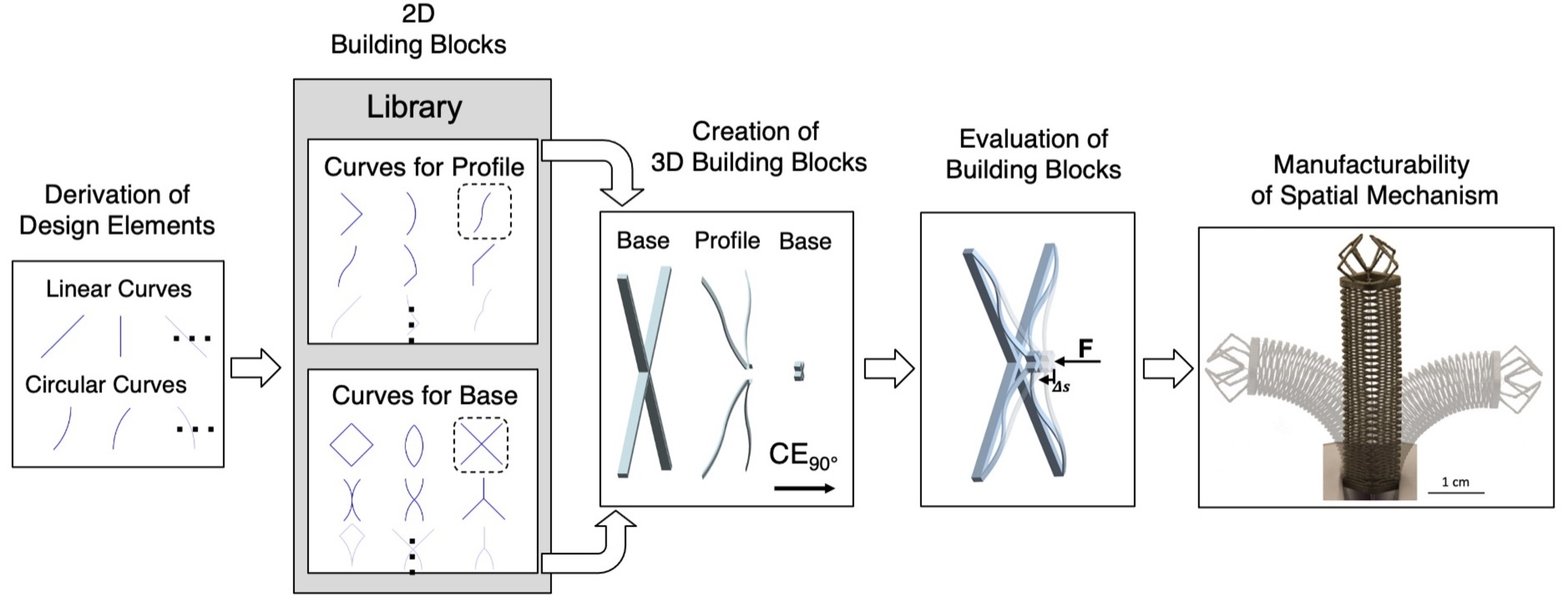
Design Synthesis of AM CMs via Building Block Approach
The synthesis and analysis of complaint mechanisms is one of its most challenging tasks, despite the many CMs advantages compared to rigid-body mechanisms. Instead of using trial-and-error synthesis approaches based on the creativity of the designer, this synthesis complexity can be supported by well-known design principles such as structural topology optimization, rigid-body replacement or building block approach. In this work, we have presented a design workflow based on a building block synthesis approach for metallic AM, which allows the designer to generate self-supported three-dimensional (3D) spatially compliant mechanism. This approach considers the AM design constraint (e.g., build angle) and enable to manufacture the parts with minimal amount of support-structure and post-processing effort.
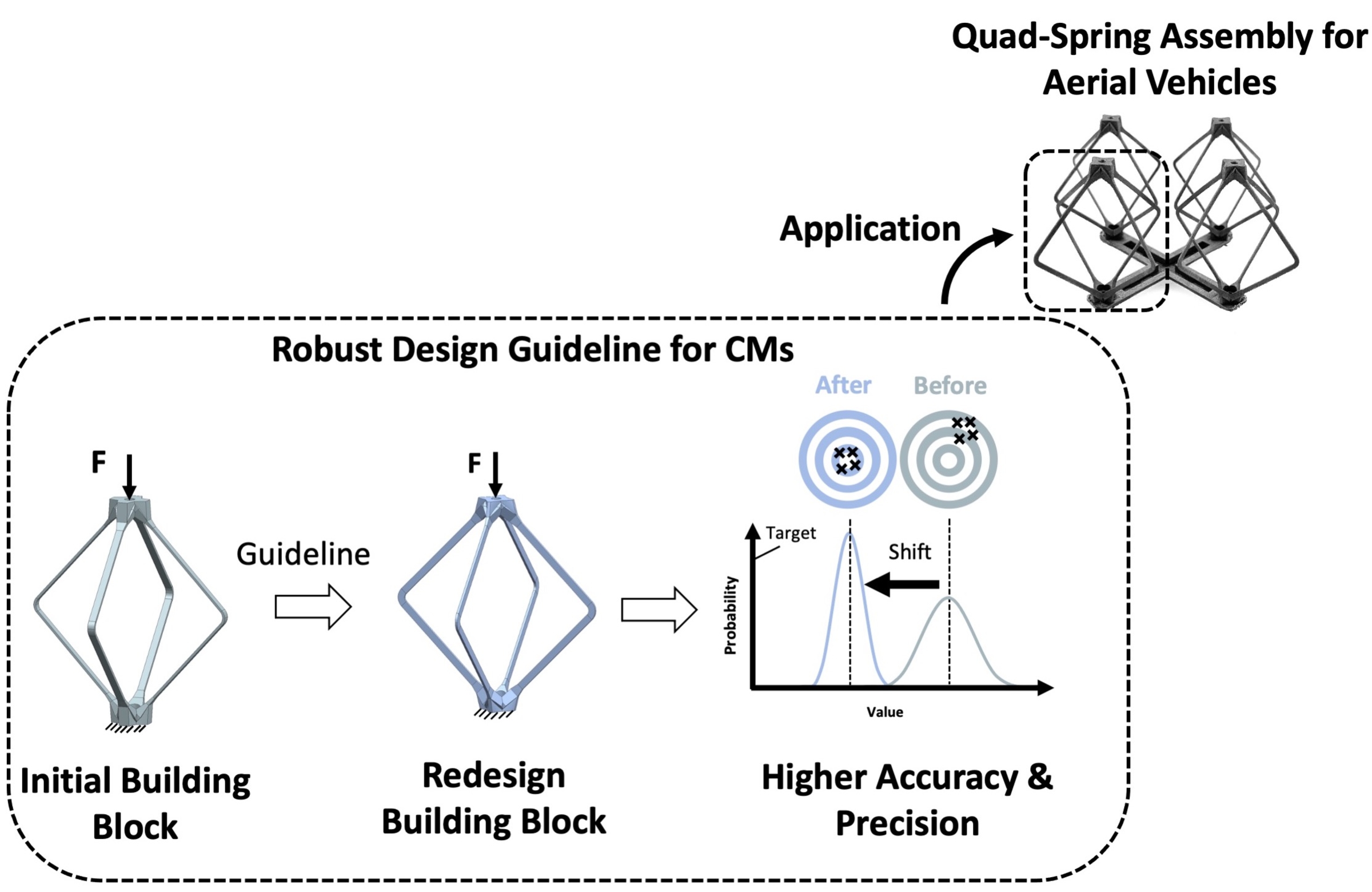
Precision and Accuracy of AM CM
Due to the monolithic nature of CM, it transmits functionalities like motion and forces with high precision. The mechanisms gain this precision through the elastic deformation of its flexible structures. However, this precision is prone to process- and machine-induced dimensional errors, which leads to discrepancies between the as-designed and as-manufactured structures and its mechanical properties. This work identified the key geometrical design factors that impacting the accuracy between the as-designed and effective stiffness of a 3D self-supported flexure. The geometrical design factors are narrowed three-ways by analytical models, numerical sensitivity analysis and design of experiment studies. A robust design guideline supports the higher accuracy and precision between as-designed and as-built stiffness. The findings were applied to manufacture flexures with a stiffness accuracy error lower than 10% and precision error lower than 2%. An implementation to robust design a quad-spring-assembly using the above developed design guidelines was applied to a vibration isolator for unmanned aerial vehicles. An experiment showed accurate placement of the spring’s natural frequency to isolate rotor induced vibrations from the payload while still transmitting vehicle dynamics.
Highly-Functional Integrated Compliant Mechanism: Brake Caliper Use Case
A highly integrated mountain bike brake caliper was synthesized with the design guidelines and synthesis approaches of AM to demonstrate the "free functional complexity" potential of AM with three added values: design freedom for internal fluid channels, the functional integration of both, a monolithic compliant membrane and topology optimized lightweight design. Traditional brake calipers are hydraulically actuated using pistons. They consist of two halves that are held together by screws. Such design might be prone to leaking. Also, the assembly and bleeding are time-consuming. We managed to reduce the number of parts from 11 to one by replacing the pistons with a compliant mechanism: a thin corrugated membrane based on the above demonstrated self-supported building block synthesis approach. This monolithic design allows the caliper to be printed as one single part with all functionalities integrated. The fluid channels were optimized to trap less air while bleeding. The -35% lightweight design is visioned to reduce fuel consumption and CO2 emissions in such an application domain.


Finalist in highly competitive design challenge:
external page https://www.purmundus-challenge.com/en/index.php
For more information please contact Johannes Vögerl or Julian Ferchow.